Pre/Post-Processing
UR3 Robot Arm
Configuration files:
FENGSim/starter/mbdyn/robot/robot_arm.mbd
This example is for a 6-dof robot arm, though without the end effector, the final dof is disregarded.
To define angle constraints using time-dependent scalar funtions in robot_arm.mbd:
#-----------------------------------------------------------------------------
# Scalar Functions
scalar function: "Fun_Motor_JoTotp_Stage",
multilinear,
0.0, 0.0,
1.0, 0.0,
2.0, -1./2.*pi;
scalar function: "Fun_Motor_JoTotj_Stage_UpperArm",
multilinear,
0.0, 0.0,
1.0, 0.0,
2.0, -2./6.*pi;
scalar function: "Fun_Motor_JoTotj_UpperArm_LowerArm",
multilinear,
0.0, 0.0,
1.0, 0.0,
2.0, -4./6.*pi;
scalar function: "Fun_Motor_JoTotj_LowerArm_Wrist",
multilinear,
0.0, 0.0,
1.0, 0.0,
2.0, 1./6.*pi;
scalar function: "Fun_Motor_JoTotj_Wrist_Hand",
multilinear,
0.0, 0.0,
1.0, 0.0,
2.0, pi;
Line 7: the first number
2.0is a time step and the second number-1./2.*piis an angle value.
Geometry files (base path:FENGSim/starter/mbdyn/robot/):
.stp file:
UR3.STEP.stl files:
down.stl,hand.stl,stage1.stl,stage2.stl,upper.stl,wrist.stl.traj files:
ur3.traj, line segments with the pose and velocity valuesUR3E technical file:
ur3e_e-series_datasheets_web.pdf
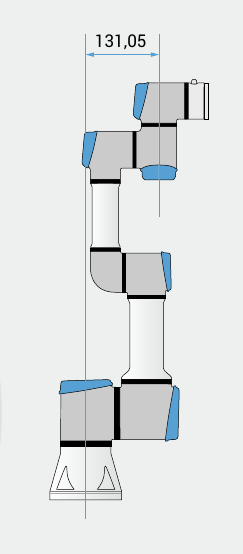
The parameter (131.05mm) shown in the figure below from ur3e_e-series_datasheets_web.pdf does not match the corresponding one (110.4mm) in UR3.STEP.
Results:
.movfiles:FENGSim/starter/mbdyn/robot/robot_arm.mov
More details for .mov format in Section 2.1 of https://github.com/mmorandi/MBDyn-web/raw/main/userfiles/documents/tutorials.pdf :
the node label
the three coordinates of the position of the node
the three Euler-like angles that define the orientation of the node (following the 1, 2, 3 convention)
the three components of the velocity of the node
the three components of the angular velocity of the node