Examples
Free Falling:
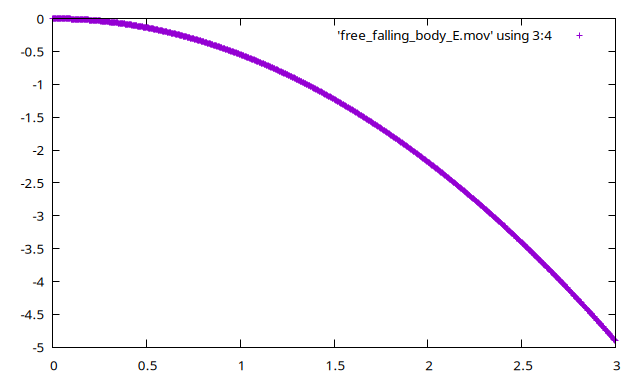
cd FENGSim/starter/mbdyn/free_falling
./../../../toolkit/DAE/install/mbdyn_install/bin/mbdyn -f free_falling_body_E.mbd
gnuplot
plot 'free_falling_body_E.mov' using 3:4
UR3 Robot Arm:
cd FENGSim/starter/mbdyn/robot
./run
Forward & inverse kinematics: the mapping between joint angles and end-effector poses (position and orientation)
Forward & inverse dynamics: the mapping between joint angles and joint torques